
2학년 2학기 과제연구라(대입 영향) 메이커 부분에 비해 분석이 부족합니다. 따라서 데이터 분석 및 강수량 추정은 유의미한 결과가 나오지 않았음을 참고바랍니다.
고등학생 논문입니다. 교내 지구과학부문 학술지에 게시되어 있습니다.
| 연구자 |
2413 류관형 2603 김민성 |
| 지도교사 |
윤명섭 |
| 요약(또는 Abstract) |
| 본 연구의 목적은 위성에서 측정하는 적외선 데이터로부터 회귀분석을 통해 강수범위를 추정하는 선행연구를 응용해 Far-IR카메라가 장착된 라디오존데 제작, 제작된 라디오존데로부터 얻은 적외선 데이터를 선행연구와 같은 방법으로 강수범위를 추정하여 유의성을 판단하는 것이다. 라디오 존데에는 Far-IR카메라 및 가시광선 카메라가 각각 데이터 수집 및 파악용으로 탑재되었고, 이 외에도 기압 센서, 온도 센서, GPS 등을 부착하였다. 카메라의 안정화를 위해 짐벌을 장착하고 나침반을 달았으며, 통신을 위해 핸드폰을 넣었다. 아두이노로 지자기 및 센서를 보정하고, 라즈베리파이로 이들을 제어하고 데이터를 저장했다. 2019년 10월 17일 4시 33분에 총 1.2kg 본체를 47L 헬륨풍선에 매달아 발사하였다. 수집된 데이터를 바탕으로 위성센서와 탑재한 Far-IR센서가 어떻게 다른지, 이를 어떻게 활용할 수 있을지, 마지막으로 이 장비를 어떻게 개선할 수 있을지를 다루었다. |
I. 서 론
현재 기상청에서 관측하고 있는 데이터는 AWS(자동 기상 관측자료), 지상 레이더, 위성 등이다. 또한, 슈퍼컴퓨터를 이용하여 대기의 운동을 계산하고 예측하여 예보를 내놓는다. 하지만 이러한 대기 모델은 기준값으로부터 시간이 지날수록 모종의 이유로 인해 오차가 커지는데, 이를 바로잡기 위해 관측데이터를 활용해 모델을 바로잡고 정확도를 유지한다.
수치예보모델은 한정된 컴퓨터 자원을 바탕으로 기상을 예측하는데, 지정된 공간에 대해 단위 정육면체로 나눠 이에 따라 동역학적 계산을 수행한다. 컴퓨터 기술의 발전에 따라 이 모델의 분해능은 수십m 수준으로 발전하였으나 기상위성은 정지궤도에 위치하므로 카메라가 고해상도를 지녀도 거리가 멀어 분해능이 1km나 되는 한계를 지니고 있다.
(기상청 날씨 누리 2019년 11월 06일)
천리안 2A 위성에서는 가시광선 센서(0.47, 0.51, 0.64, 0.86), 수증기 센서(6.3, 6.9, 7.3), 원적외선 감지기 (8.7, 9.6, 10.5, 11.2, 12.3, 13.3)를 이용해 관측하고 있고, 선행연구에서 Himawari-8의 위성 데이터에서 6.2, 8.6, 11.2, 12.4파장 대역 데이터를 뽑아 각각을 조합하여 독립변수로 하고, 실제 강수량을 종속변수로 한 회귀분석을 통해 강수량과의 유의성을 측정한 연구에서 위성만으로 강수량은 부정확하지만, 강수 범위를 추정하는 데에 유용함을 보였다.
라디오존데에 탑재된 IR센서는 필터가 없으므로 위성같이 특정 파장의 세기를 측정하는 장치가 아니다. 하지만 기상청에서 배포하는 위성 기상학에 따르면 구름을 지구복사에 대해 흑체로 가정하고 이가 방출할 수 있는 복사에너지에 따라 구름의 종류가 결정되고 이에 따라 강수 가능성도 달라진다. (기상청 n.d. 25-34) 위성은 태양의 직접복사에 의한 간섭 때문에 이 센서를 탑재할 순 없지만, 이 센서를 통해 강수 범위 및 강수량을 분석할 수 있다면 경제적이며 국소범위 관측에 더 유리할 것이다.
이에 착안하여 라디오존데에 원적외선 카메라와 가시광선 카메라를 연직방향으로 달고, 가속 좌표계에서의 짐벌을 설계하여 카메라를 안정화한 후, 두 카메라 데이터를 비교 및 분석하여 데이터에서 알 수 있는 것을 알아보겠다.
II. 실 험
1. 장치 부품
| 제품명 |
FLIR Lepton 2.0 |
Raspberry Pi Camera Module |
| 해상도(pixel) |
80*60 |
3280*2464 |
| 파장 대역(um) |
8~14 |
0.38~0.75 |
| 화각(deg) |
51° |
62° |
| 열 민감성(mK) |
<50 |
|
| 제어 인터페이스 |
I2C |
CSI |
| 영상 인터페이스 |
SPI |
CSI |
| 촬영 지연시간(s) |
<0.5 |
다양함 |
| 센서 크기(inch) |
1/4 |
1/4 |
| 조리개 |
|
f/2.0 |
| 작동온도 |
-40℃~ |
-20℃~ |
가시광선 영역 카메라와 원적외선 카메라의 제원은 표 3에 나타내었고, 라즈베리 파이 3 Model B를 중앙처리장치로 사용하여 이미지 파일과 아두이노 나노와의 시리얼 통신 데이터를 저장하였다. 0bar~2bar 측정범위의 기압 센서와 아두이노 나노 2개, 비접촉식 온도 센서, 9축 자이로 센서인 MPU 9250, GPS ne-M7, 서보모터 mg90 2개, 18650 배터리 4개와 배터리 홀더, DC 모터 드라이브(SZH-MDBL-002), 원형 만능기판 5개, 카본파이프, 마이크로 5핀 케이블 2개, 레귤레이터(LM7805act), 100uf 전해콘덴서 10개, 10uf 전해콘덴서 10개, 고휘도 LED BLUE 1개, 렌치 볼트 M8*15 10개, 핀 헤더 40, 4개, 핀 소켓 40, 4개가 장치의 전자 부품이다. 지관, 사각 스티로폼과 건축자재에 활용되는 열 반사 단열재를 사용하였다.
2. 장치 제작
가. 전체적인 구조
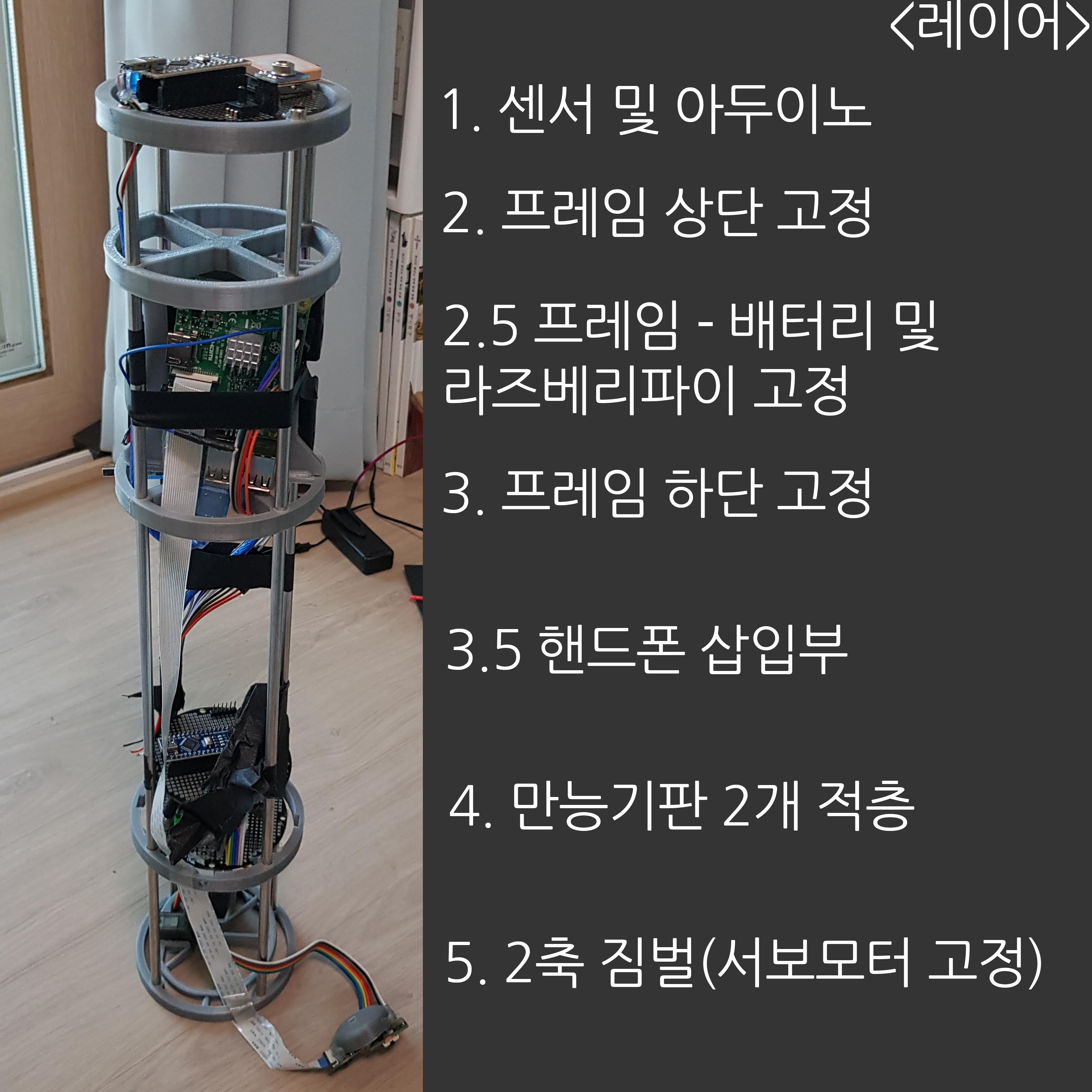

이 장치의 전체적인 골격은 그림 2과 같이 철심 4개가 각각의 3D 프린팅된 레이어를 지지하고, 그림 3처럼 이를 지관과 단열재가 덮는 형태이다.
나. 레이어 제작
각각의 레이어는 3D 프린팅되었다. 지관이 원통형이므로 레이어의 둘레는 지관의 둘레보다 작아야 했다.
통신을 담당할 핸드폰은 3번과 4번 레이어 사이에 끼워 넣었다. 핸드폰은 뽁뽁이로 둘러서 중간에 꽉 차게, 단 레이어의 둘레보다는 작게 했다. 핸드폰은 지관에 넣기 직전에 넣어준다.
다. 1번 레이어 구성

1번 레이어에는 그림 4와 같이 배치되었다. 반시계방향으로 아두이노 나노(1번), 기압 센서(2번), 무접촉식 온도 센서(3번), GPS(4번), GPS 통신 보드(5번), LED(6번)이다. 아두이노 나노는 과전류로 인한 손상의 위험이 있으므로 핀 헤더를 납땜하여 탈착할 수 있도록 했다. 기압 센서와 온도 센서, GPS의 좌표를 시리얼 모니터로 받아오도록 했으며, GPS의 작동을 확인하기 위해 위성에 연결되었을 경우 파란색 LED(6번)가 작동하도록 했다. 아두이노 나노의 시리얼 모니터값은 하단의 라즈베리 파이로 전송된다.
라. 2번 및 3번 레이어 구성

그림 5의 라즈베리 파이는 Far-IR 카메라 및 파이 카메라의 촬영 및 제어를 담당하고, 아두이노로부터 시리얼 통신 데이터를 받아 SD카드에 저장된다. GPIO핀으로 Far-IR 카메라와 SPI, I2C 통신을 하고, CSI 핀을 통해 파이 카메라와 통신한다. 두 카메라의 선은 30cm 이상 길어야 하는데, 짐벌과 라즈베리 파이의 위치가 상당히 떨어져 있기 때문이다.
코드는 data.txt파일에 시간, 사진 번호, 파이 카메라 노출값, 위도, 경도, 기압, 표면 온도, 흑체 온도를 저장하도록 했다. 각각의 값은 쉼표로 구분하고 사진이 찍힐 때마다 업데이트하여 줄 바꿈 하도록 했다. 이는 분석시 .csv파일로 변환하여 엑셀에서 여는 데 유리하게 해준다. 카메라는 pylepton 예제(FLIR | Lepton Sep 6, 2019)와 pi camera 라이브러리(Picamera Sep 6, 2019)를 사용했다.
또한, 촬영포맷을 동영상으로 정할 수 없었는데, 상공에서의 작동을 보장할 수 없고, 이로 인해 파일이 깨질 가능성이 있기 때문이었다. 따라서 Far-IR 카메라와 파이 카메라의 사진 촬영을 반복시켜야 했고, 매회 data.txt파일의 열고->수정->닫음으로써 안정성을 높였다. Far-IR 카메라가 반응속도가 더 빠르므로 반복문의 앞에 배치했다. 부록 1에 작동된 코드가 들어있다.


그림 6의 1번 배터리에서 라즈베리 파이에 전원을 공급하고, 2번 배터리에서 짐벌 및 지자기 센서를 작동시킨다. 그림 7에서는 마이크로 5핀인 라즈베리 파이 전원의 입력을 맞추기 위해 전원공급 보드(5V 3A 스텝다운 컨버터)를 1번 배터리에 연결하고 5cm의 USB to micro 5pin 케이블을 통해 라즈베리 파이로 연결하였다.
마. 4번 레이어 구성

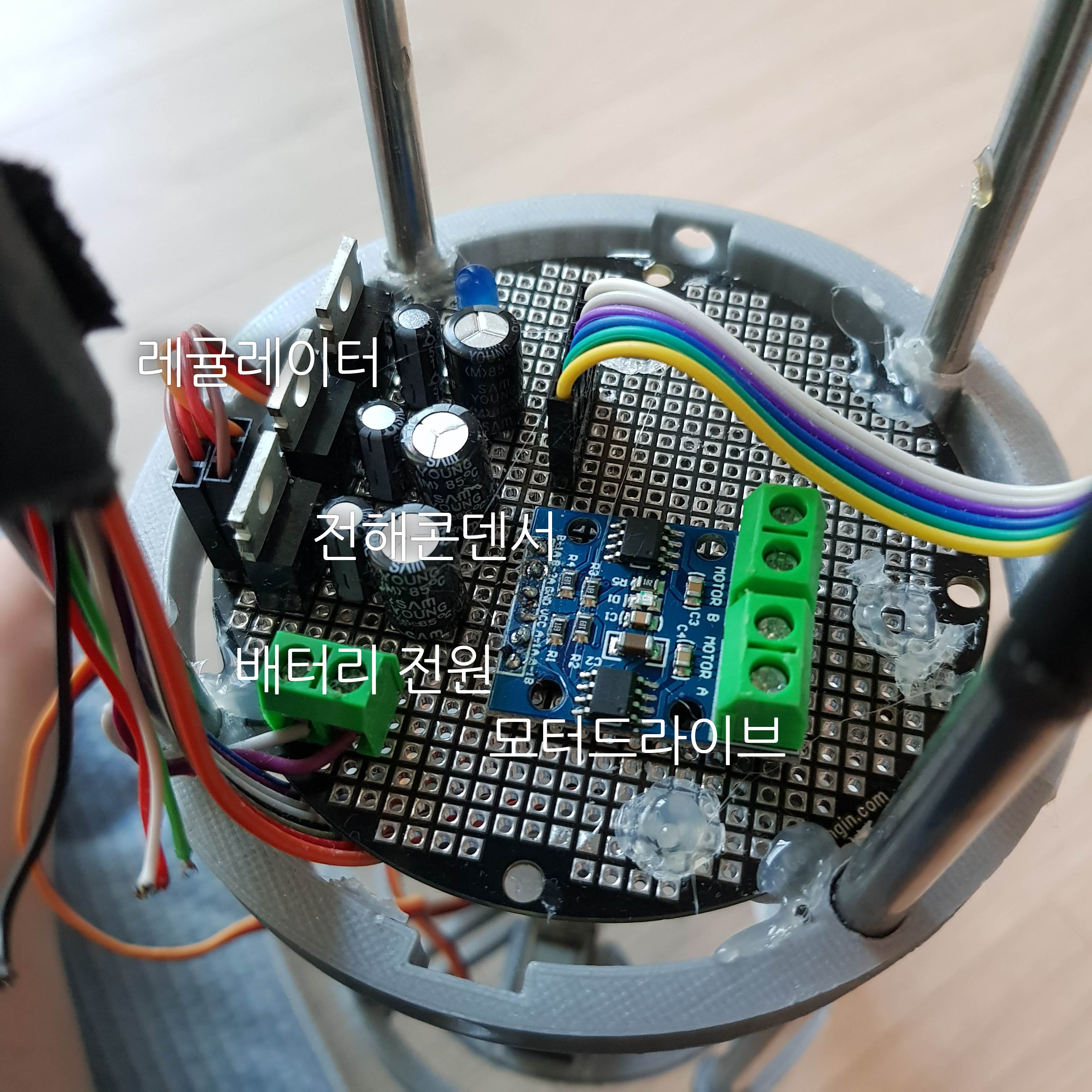

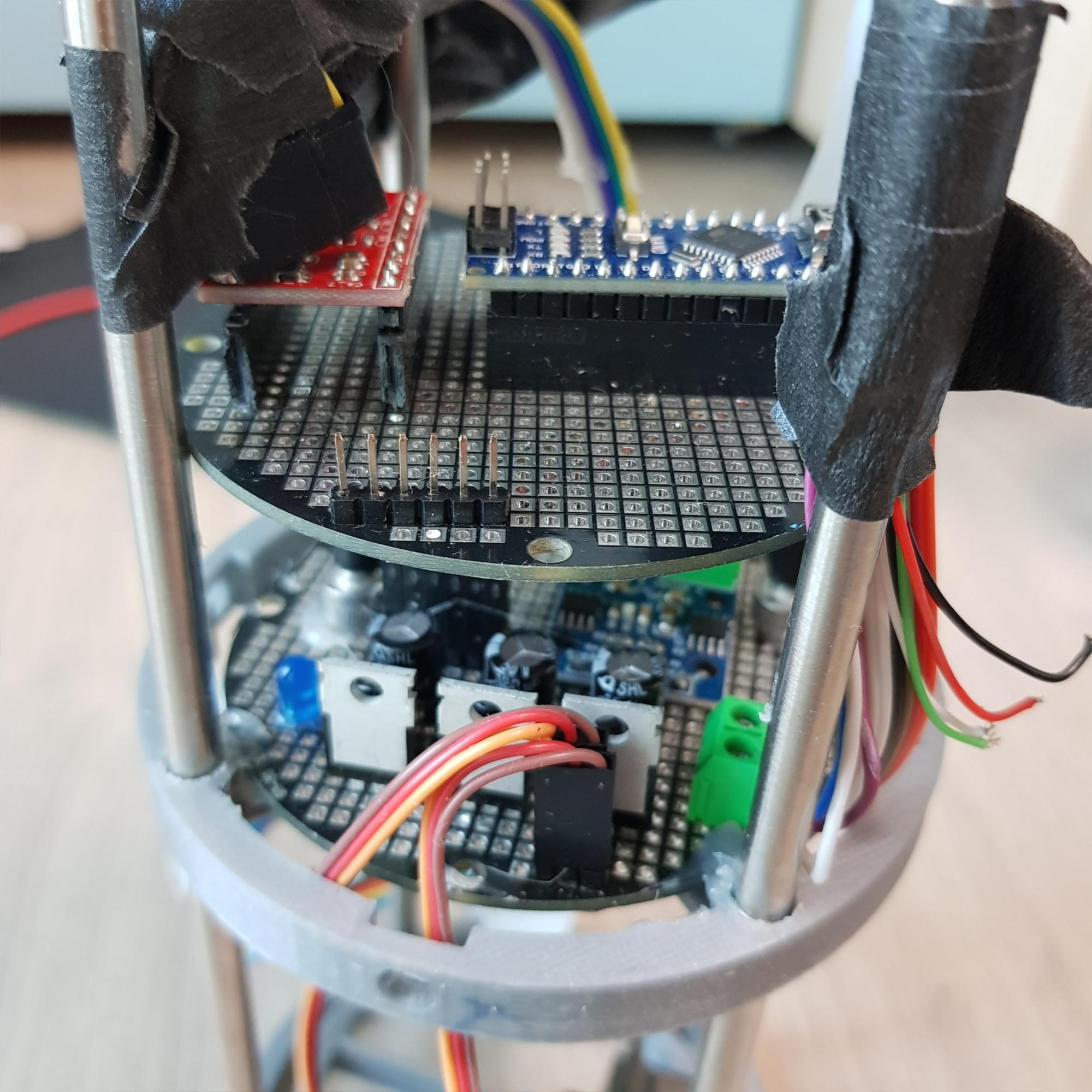
그림 8에서는 핸드폰을 넣기 위해 선정리한 것이다. 4번 레이어에는 5번레이어에 들어갈 서보모터를 제어하는 부분이다. 짐벌을 구동하기 위해서는 아두이노 나노에서 지자기의 지구자기장 값을 받아와 칼만 필터로 보정을 해줘야 한다. 매끄러운 짐벌의 구동에서는 필수적이며, 아두이노에서는 이를 하부기판의 모터드라이브를 통해 서보모터 2개를 제어한다. 또한, 하부기판은 배터리의 전원을 안정적으로 아두이노 나노와 모터로 보내기 위한 전력시스템을 포함한다.
바. 5번 레이어 구성
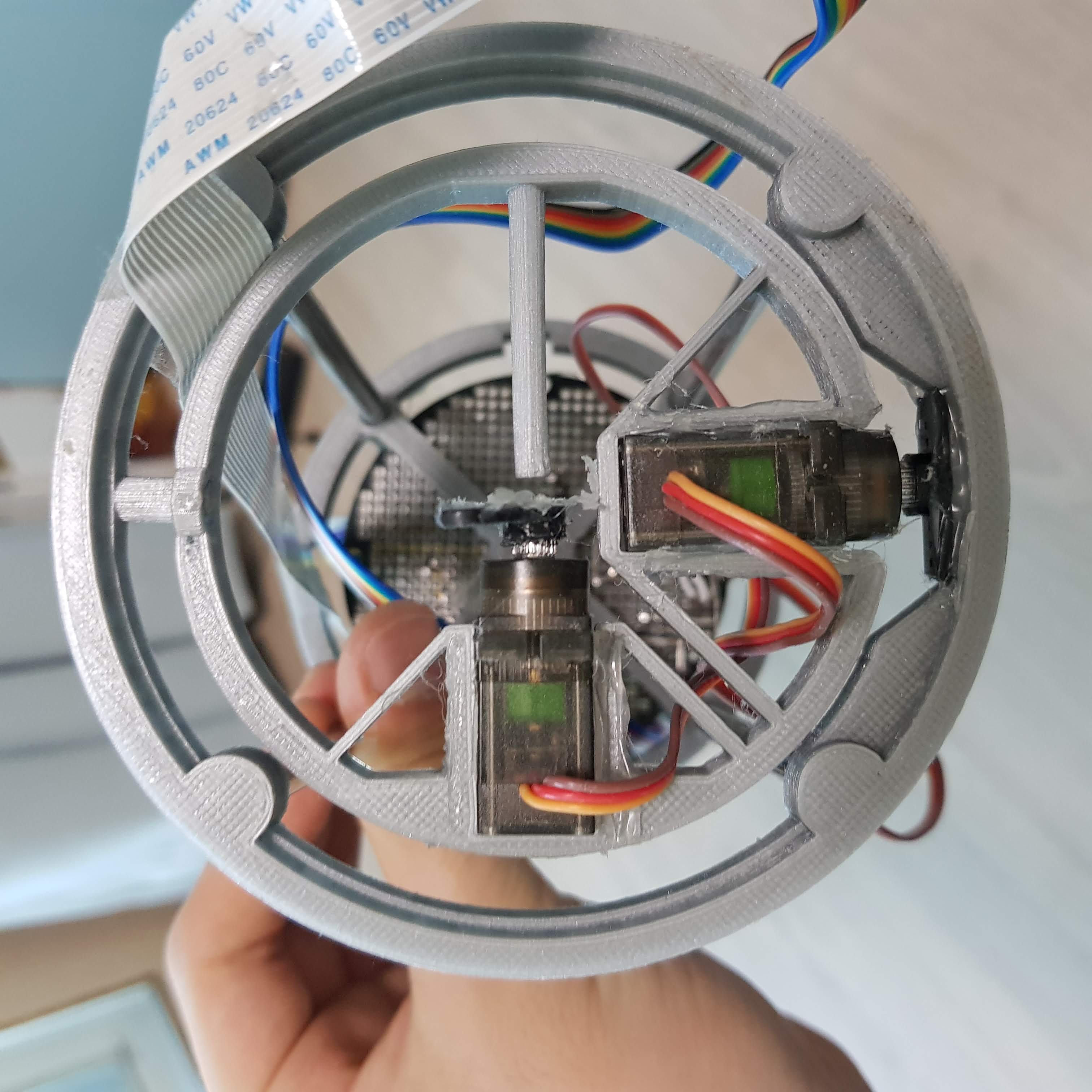
4번레이어에서 제어된 값을 서보모터에 입력한다. 그림 12에서는 서보모터가 제어하는 각 축을 보여준다. 사진상 가로로 고정된 모터는 내부 판에 고정되어 있어 외부 판을 돌리는 역할을 한다. 세로로 고정된 모터는 카메라를 고정하는 판을 회전시킨다. 그림은 수집 후의 모습이므로, 낙하 충격 때문에 파괴되어 떼어져 있는 상태이다.
사. 보온 및 낙하산, 풍선 연결


지관 안에 들어가도록 제작되었으므로 지관 바깥에 보온재를 싸서 단열을 해주어야 한다. 따라서 스티로폼을 각목 형태로 잘라서 지관 표면에 빈틈없이 붙여준 후 알루미늄 테이프로 고정했으며, 그 바깥을 방출되는 복사열을 막기 위해 잘 휘고 복사열 차단 코팅이 되어있는 비금속 재질의 건축단열재를 사용하여 방출되는 복사열을 차단했다. 상승하면서 공기의 밀도가 낮아지게 되면 시스템은 대류에 의한 열 손실이 아니라 복사열에 의한 열 손실 효과가 더 커지기 때문에, 그리고 이는 작동온도가 0~40℃인 배터리에 상당한 영향을 끼치기 때문에 이러한 보온을 해주는 것이다.
낙하산을 연결하기 위해서는 지관 상부에 구멍을 뚫고 지름 3mm의 과학상자용 철봉을 십자로 넣은 후 고무 패킹 처리를 하여 지관에 가해지는 압력을 줄였다. 보온재 상부를 알루미늄 테이프로 마무리했다.
아. 문제점 해결 및 마무리
기능이 많을수록 보이는 문제점 또한 많았는데, 아래는 개발과정에서 생긴 문제점과 해결한 방법이다.
IR센서가 제대로 작동하지 않아 어려움을 겪었다. 이는 라즈베리 파이에 GPIO핀으로 통신하기 때문에 접촉 불량이 있었다. 새 케이블로 교체하고 글루건을 붙임으로서 해결했다.
핸드폰이 관성에 의해 4번 레이어 및 아두이노를 손상하거나 리셋시킬 수 있으므로 테이프로 임시 레이어를 만들었다. 이는 핸드폰이 아무런 접착 없이도 장착될 수 있게 해준다.
지관에 제어부를 넣으면서 짐벌을 건드리거나 다른 부분을 파손시킬 수 있으므로 최대한 조심하며 넣었다.
4번 레이어와 5번 레이어 사이에 넣을 예정이었던 회전 고정장치인 플라이휠의 모터가 적당히 빠르지 않아 제거되었다. 대신 나침반을 파이 카메라에 보이게 장착했다.
센서를 담당하는 아두이노의 케이블 및 라즈베리 파이의 전원케이블이 지관을 벗어났는데, 설계 문제였다. 케이블을 보호하고 있는 고무를 깎아서 해결했다.
자. 발사일정 조정
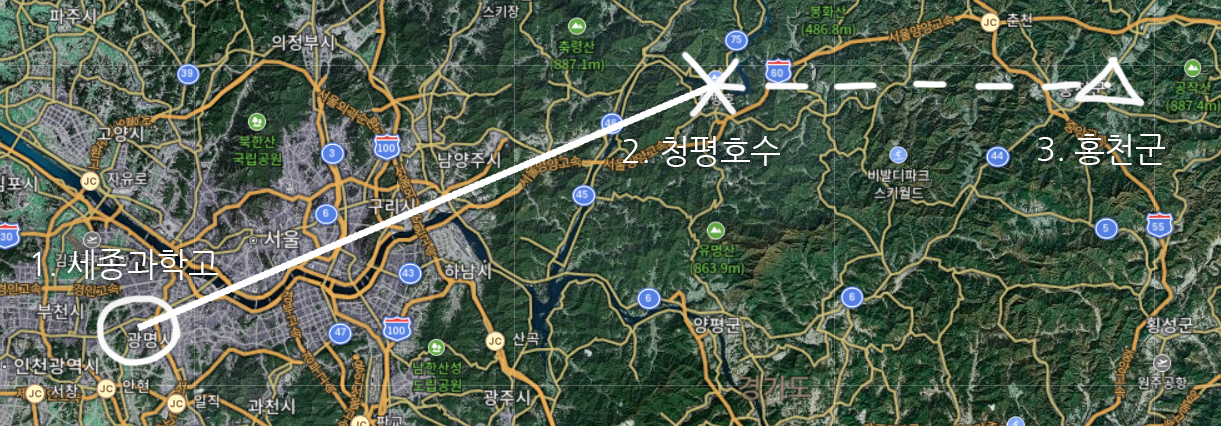
그림 15의 제트기류가 겨울이 될수록 빨라지면서 심할 경우 동해에 떨어질 수 있으므로 발사를 최대한 앞당길 수밖에 없었다. 가을하늘이 구름이 없고 비가 잘 오지 않는 것은 물론이거니와 헬륨 충전업체와 일정을 조정해야 했고 기숙학교의 특성상 제한된 시간밖에 날리지 못했기 때문에 비 오는 날이나 구름이 많은 날로 일정을 유동적으로 조정할 수 없었다. 발사 당일인 10월 17일 4시 또한 GFS 대기 모델에서는 구름이 많다고 나와 있으며 이를 근거로 발사를 계획했지만 대기 모델과는 다르게 너무나도 화창했다.
예상 경로와 작동을 멈춘 곳, 수집한 곳은 그림 16과 같다. 청평호수에서 작동을 멈췄으며, 수집한 곳은 홍천군이다.
III. 결과
라디오 존데에 설치되어 있던 GPS와 기압계는 제대로 작동이 안 되어 IR 카메라가 사진을 찍었을 때의 위치를 제대로 알 수 없었다. 이로 인해 헬륨가스를 47L, 라디오 존데의 본체 무게 1.2kg을 고려하여 상승속도를 약 6m/s라 가정을 하고, 발사시간인 16:33:18을 기준으로 위치를 계산해 예측했다.
IV. 고 찰
1. 데이터 분석
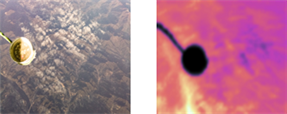
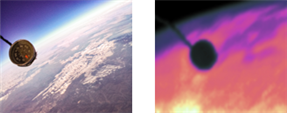
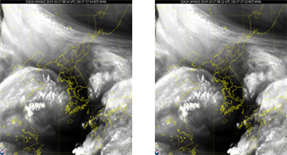
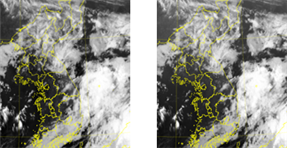
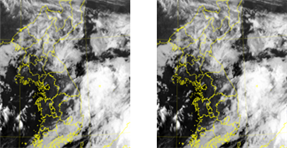
서론에서 언급했듯이, 라디오존데에 장착된 센서는 모든 물체를 흑체로 가정한 후 극대 파장을 구하여 짧은 파장은 흰색, 긴 파장은 검은색으로 나타낸다. 또한, 센서의 원리 데이터 시트에서(FLIR 2010, 17-27) 알고리즘을 파악할 수 있었는데, 찍히는 픽셀 중에서 가장 짧은 파장과 가장 긴 파장을 각각 흰색, 검은색으로 하여 중간의 파장을 선형으로 표현한다는 것이었다. 이는 카메라의 노출 조정 과정과 비슷하다. 따라서 Far-IR 센서에서 얻어지는 데이터는 위성과 같이 절대적인 값이 아니고, 주변 물체에 따라 변하는 상대적인 값이다. 계획에 따르면 위성과 라디오존데의 데이터를 비교하여 강수량 및 강수 범위 측정에 유의함을 따졌을 것이나, 프로젝트 일정의 특성상 비 오는 날 또는 흐린 날을 찾을 수 없었고, IR 카메라에는 구름이 찍히지 않았으며, 그나마 구름이 있는 3~4장의 사진 또한 그림 17, 18과 같다. 이는 위성의 분해능보다 한참 작으므로 대조할 수 없었고, 본래 목적인 강수량 및 강수 범위 추정에 활용할 수 없다. 따라서 아래의 고찰은 이 센서의 강수량 측정에 있어서 위성과 같은 유의성이 확인되었다는 것을 가정으로 한다.
가) 라디오존데를 통한 관측으로 국소적 부분에서 더욱 자세한 데이터 수집 및 연구가 가능
서론에서 설명한 위성 데이터를 통해 강수 범위를 추정하는 연구논문에서는 위성 데이터만을 가지고 회귀분석하여 강수 범위를 측정한 것이다. 하지만 위성 데이터의 분해능, 한 픽셀이 적용되는 실제 범위가 약 1km² 정도 된다. 즉 1km²보다 정확한 연구를 할 때 라디오존데를 통해 얻은 IR 카메라의 데이터로 1km² 내의 범위의 데이터를 더 세분화할 수 있다.
실제로 라디오존데가 측정할 수 있는 최소분해능은 상공 25km 기준 약 250m로, 0.062km²의 분해능을 제공한다. 추후 연구에서 특수한 기상 현상이나 지표면 가열이 일어날 때 라디오존데를 띄움으로써 더 자세한 관측이 가능하다. 이 예시가 아래의 토네이도 관측이다.
나) 자연재해 관측을 통한 데이터 제공
토네이도는 빅데이터를 통한 예측만 가능하고 수치 예보 적인 방법이 제공되지 않는다. 하지만 학계에서는 이를 예측하기 위해 토네이도 내부에 들어가 촬영이나 풍랑, 등을 분석하거나 비행기를 띄워 가까이서 관측한다. 실제로 스톰체이서라고 불리는 토네이도 관측 차량은 관측장비를 싣고 중무장하여 토네이도 속으로 들어간다. (mpark 2019년 11월 06일) Cloudsat은 허리케인 내부의 수직구조를 관측하고 강수량을 측정한다. (이민지 2012, 1) 토네이도 내부로 라디오존데를 띄운 사례도 있었다. (noaa.gov 2019년 11월 06일)
토네이도의 정확한 원인은 밝혀지지 않았지만, 현재까지 알려진 바로는 상하층의 큰 온도 차와 위아래의 바람 방향이 정반대인 연직시어가 나타날 때 지상 저기압이 위치하면 만들어진다는 것이다. 이때 엄청난 대기 불안정이 유도된다. (서울 기상센터 2019년 11월 06일) 토네이도 내부에 들어가게 되면 IR센서는 지표면부터 구름까지의 높이만을 측정함으로써 높이가 0~x m까지의 구름에 강수량, 강수 범위를 측정할 수 있는 것이다. 위성과 센서의 관계가 유의미하지 않더라도, 센서는 온도를 측정하므로 연직 시어와 구름 온도의 상관관계를 밝힘으로써 토네이도 예측 연구에 유의미한 데이터를 제공할 수 있을 것이다. 이를 태풍이나 해일 등 자연재해와 온도, 강수량과의 상관관계를 밝히는 연구로 확장될 수 있다.
2. 개발과정 분석 및 개선
라디오존데 개발은 10월 4일부터 17일까지 이루어졌다. 고층에서의 작동을 보장하기 위해서는 개발과정에서 설계 실수나 고장이 있으면 안 된다. 하지만 개발하고 띄우며 찾아오는 전 과정에서 몇 가지 실수를 발견해 이를 열거하고 개선방안을 생각해보고자 한다.
수집된 데이터를 받아왔을 때 작동되지 않은 센서는 GPS, 기압센서이다. GPS는 보온재 상부의 금속재질인 알루미늄 테이프와 철봉이 간섭하여 위성 신호를 제대로 받아올 수 없었고, 이에 대한 해결책으로 GPS 선을 연장해서 보온재 위에 붙이는 방법이 있다. 기압센서는 막힌 것 같다. 이때 호스를 달고 바람을 불어 테스트에서 잘 작동하는지 확인하는 방법으로 개선할 수 있다. 만약 기압센서 입구가 막혔다면 그 부분을 잘라서 해결할 수 있다.
기체의 흔들림에 짐벌이 따라갈 수 없었고 이로 인해 사진들이 연직방향을 향하지 않게 되었다. 정량적인 데이터 분석을 하려면 짐벌을 시중에 나와 있는 수준으로 개발하여 넣어야 할 것으로 보인다. 그리고, 회전하는 문제는 동체 회전 방지장치인 플라이휠을 넣고 지자기 값 또한 파일에 저장함으로서 해결할 수 있다.
이 기체는 방수가 되어있지 않아 비구름을 지나가게 되면 모터나 센서가 침수 및 단락되어 작동을 멈출 수 있다. 발수 코팅이나 다른 침수 방지 설계를 통해 해결해야 할 것으로 보인다.
V. 결 론
라디오존데에 수집된 데이터는 흔들림이 많고 구름이 찍히지 않아 정량적 분석 및 위성과 대조할 수 없었다. 하지만 다른 시도에서 비구름이 관찰된다면 이를 선행연구에서의 강수량추정 방법을 통해 위성 데이터와 라디오존데 데이터를 비교해볼 수 있을 것이다. 여기서 적절한 유의성이 관찰된다면 나중 연구에서 국소적 부분에 대해 위성보다 더 나은 분해능으로 데이터를 수집할 수 있을 것으로 보인다.
참 고 문 헌
[1] 이민지. 2012. Cloudsat으로 촬영한 허리케인샌디(Sandy)의 내부. n.p.: 항공우주연구원.
[2] "폭풍 속으로 뛰어드는 토네이도 관측 차량의 모든 것." (2019년 11월 06일). mpark. 2019년 9월 11일 수정, http://www.m-park.co.kr/magazine/article_view.asp?idx=3392.
[3] "Cooperative Hurricane Upper Air Stations (CHUAS) Network in the Caribbean." (2019년 11월 06일). noaa.gov. last modified n.d., https://www.wmo.int/pages/prog/www/tcp/documents/CHAUS_38thHurricaneMeetingVersion3.pdf.
[4] "[기상학] 토네이도 현상 발생 원리 및 후지타 계급." (2019년 11월 06일). 서울 기상센터. 2018년 4월 30일 수정, https://blog.naver.com/jungjinkim97/221265028724.
[5] "수치 예보." (2019년 11월 06일). 기상청 날씨누리. http://www.kma.go.kr/down/e-learning/beginning/beginning_04.pdf.
[6] "Pylepton Overlay Guide 2.0 for Raspbian Pixel." (Sep 6, 2019). FLIR | Lepton. last modified Dec 6, 2016, https://lepton.flir.com/forums/topic/pylepton-overlay-guide-2-0-for-raspbian-pixel/.
[7] "4. Basic Recipes." (Sep 6, 2019). Picamera. last modified n.d., https://picamera.readthedocs.io/en/release-1.10/recipes1.html.
[8] FLIR. 2010. FLIR LEPTON® Long Wave Infrared (LWIR) Datasheet. n.p.: FLIR.
부 록
1. 사진 촬영 및 데이터 저장 코드
import time
import datetime
import serial
import sys
import cv2
import numpy as np
from picamera import PiCamera
from os import system
from pylepton import Lepton
port = "/dev/ttyUSB0"
serialFromArduino = serial.Serial(port,9600) #port data
#input data
f=open("/home/pi/Downloads/et_cetera/data/data.txt", 'w')
#capture=cv2.VideoCapture(0)
#capture.set(cv2.CAP_PROP_FRAME_WIDTH, 1640)
#capture.set(cv2.CAP_PROP_FRAME_HEIGHT, 1232)
f.write('')
f.close()
camera=PiCamera()
camera.resolution=(1640, 1232)
camera.rotation=270
i=0
input_s = ''
while i<3600: #capture 3600 pictures
before=time.time()
bef=datetime.datetime.now()
befmils=bef.strftime('%f')
f=open("/home/pi/Downloads/et_cetera/data/data.txt", 'a')
i+=1
camera.capture("/home/pi/Downloads/et_cetera/data/picam/"+str(i)+".bmp")
with Lepton() as l:
a,_ = l.capture()
cv2.normalize(a, a, 0, 65535, cv2.NORM_MINMAX)
np.right_shift(a, 8, a)
#ret, frame = capture.read()
#cv2.imwrite("/home/pi/Downloads/et_cetera/data/picam/"+str(i)+".bmp", frame)
cv2.imwrite("/home/pi/Downloads/et_cetera/data/lepton/"+str(i)+".bmp", np.uint8(a))
now=datetime.datetime.now()
nowstr=now.strftime('%H:%M:%S,%f')
input_s =str(serialFromArduino.readline())
c=nowstr+", "+str(i)+", "+str(camera.analog_gain)+", "+input_s+",\n"
#csv: time(hmsf), photo number,iso;shutterspeed,
#--> latittude, longitude, pressure, temp1, temp2...
f.write(c)
after=time.time()
delta=after-before
print(i,",", format(delta, '.3f'), ",", c, end='')
f.close()
if delta<2.00:
slept=2.00-delta
time.sleep(slept)
print(end='\n')
elif 2.00<=delta<3.000:
print('over')
else:
print("error")'프로젝트 > 아카이브' 카테고리의 다른 글
| Oxtoby 일반화학 분권 표지 디자인 (0) | 2020.03.01 |
|---|---|
| [논문]바나나 껍질의 마모량에 따른 마찰계수와 구조의 관계 (0) | 2020.03.01 |
| 라디오존데 제작 보고서 (2) | 2020.03.01 |
| 3축 미세조정 거울지지대 제작 보고서 (0) | 2020.03.01 |
| Calculus 8th Ed. 분권 표지 디자인 (0) | 2020.03.01 |